unity动捕插件(手套+安卓)使用文档
简介
本文档将帮助你如何使用游戏引擎 Unity 3D 通过此sdk拿到数据手套数据,并正确驱动手模型。
Unity动捕插件包导入项目
动捕手套插件包
| 插件文件 | 版本 | 日期 | 更新日志 |
|---|---|---|---|
| mostechPlugin_Android_V1.1.0.unitypackage | V1.1.0 | 2024-11-04 | 【新增】 1.支持手套自研设备 |
| mostechPlugin_Android_V1.0.0.unitypackage | V1.0.0 | 2024-10-17 | 【新增】 1.采集器手套实时数据 2.姿势校准 3.设备详情 |
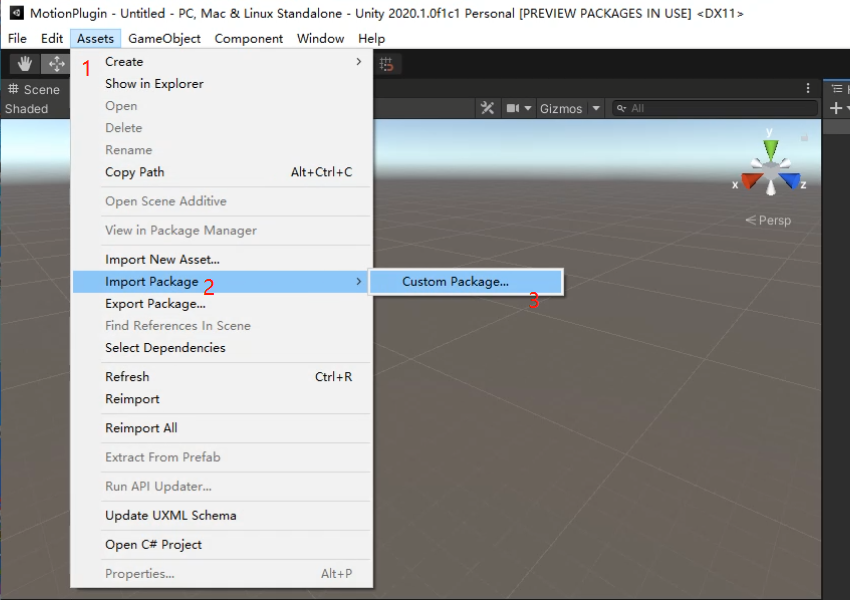
打开unity工程后点击Asset>Import Package>CustomPackage>mostechPlugin_Android.unitypackage添加到unity工程即可
插件包介绍
接口调用流程
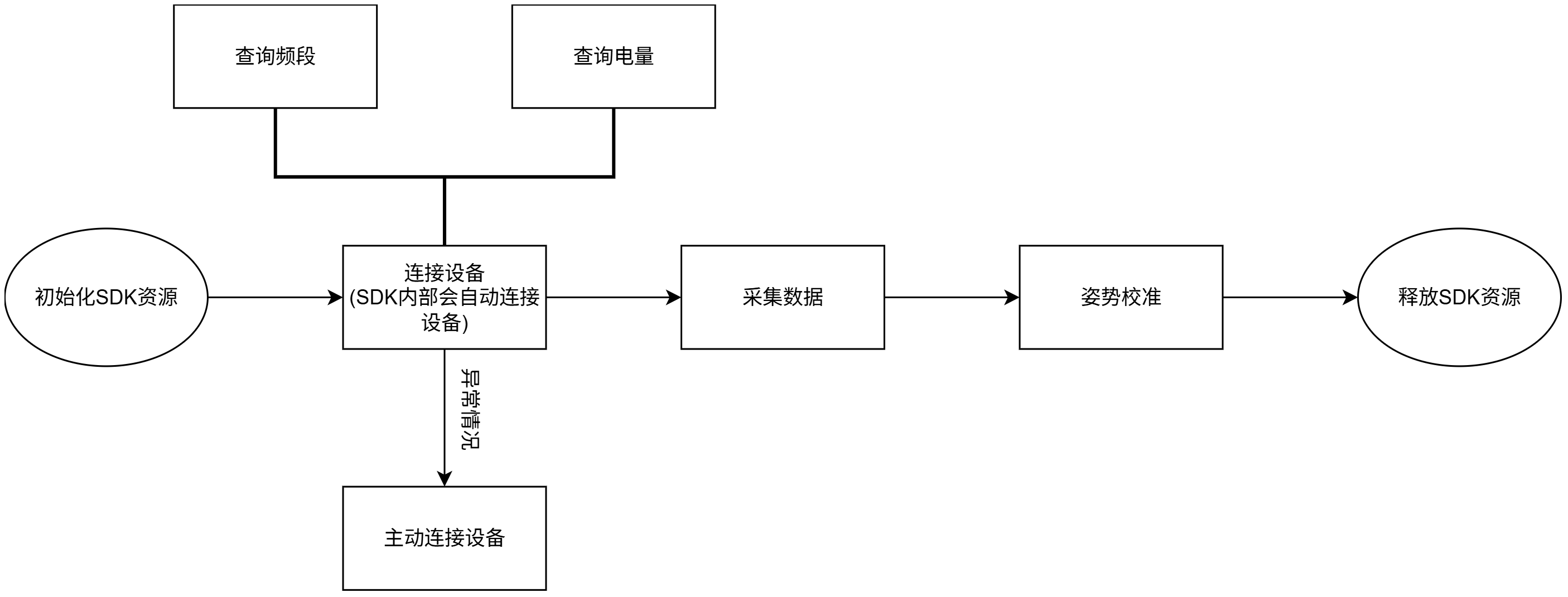
注解:
-
采集数据过程中,调用类似查询电量的接口拿到结果后,需要重新调用采集数据接口
-
需要打包进安卓设备才可运行调试
2.1场景介绍
在 Assets >Mostech > MotionCapture_Android>Scenes 可以看到示例场景
- GloveMotionCaptureDemo ,获取手套数据驱动手模型
安装包
2.2脚本介绍
-
在Assets>Mostech>MotionCapture_Android>Scripts>Mostech_AndroidSerialPort.cs
所有和串口相关,例如:手套数据、电量等
-
在Assets>Mostech>MotionCapture_Android>Scripts>Mostech_MotionDriver.cs
驱动手模型相关
-
在Assets>Mostech>MotionCapture_Android>Scripts>Mostech_UIManager.cs
界面相关
-
在Assets>Mostech>MotionCapture_Android>Scripts> Loom.cs
子线程向主线程中添加事件,避免子线程直接调用unity主线程中方法报错。每个场景中必须要
添加Loom.cs脚本。
2.3脚本Mostech_AndroidSerialPort.cs详细说明
通过此脚本和安卓串口通信sdk交互,安卓sdk中使用流程为:获取实例>初始化资源>销毁实例。
手套设备的连接由安卓sdk控制
2.4脚本Mostech_MotionDriver.cs详细说明
通过此脚本驱动手模型,需要绑定左右手各16个骨骼。暂时只支持固定骨骼的手模型(后续版本中会支持任意骨骼)。
模型要求
-
模型所有骨骼自身坐标系为左手坐标系,x轴向右,y向上,z向前
-
左右手各个手指由三部分组成,手指近端、中端、末端组成
-
手指各个骨骼初始姿态欧拉角为(0,0,0)
俯视图
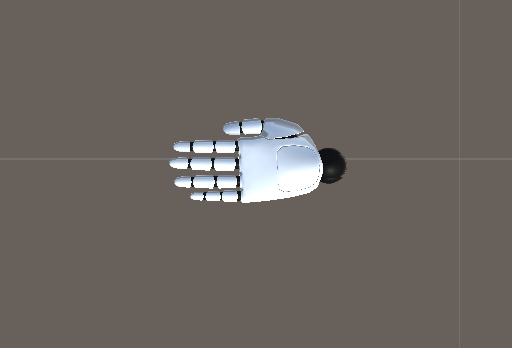
侧视图
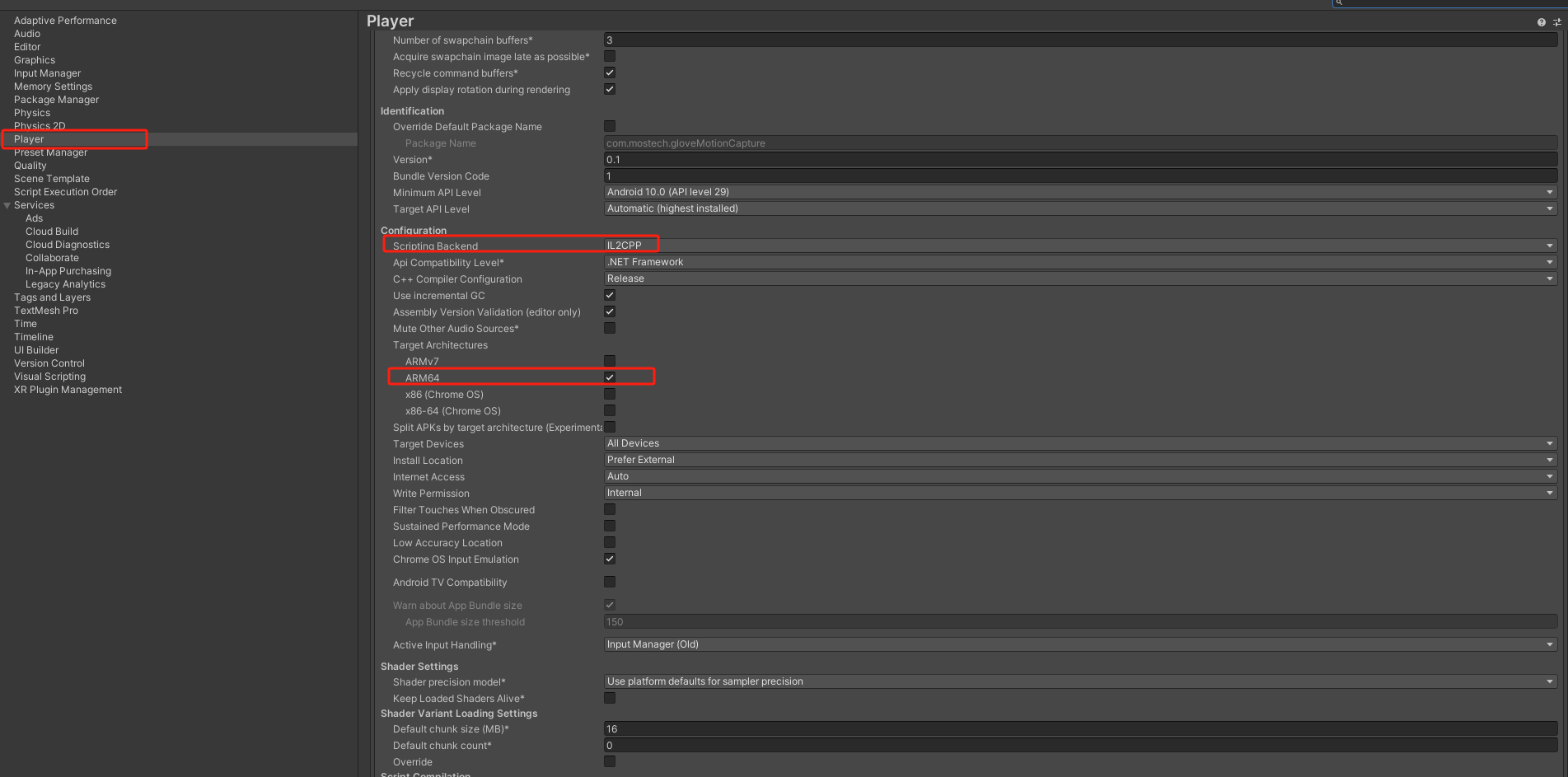
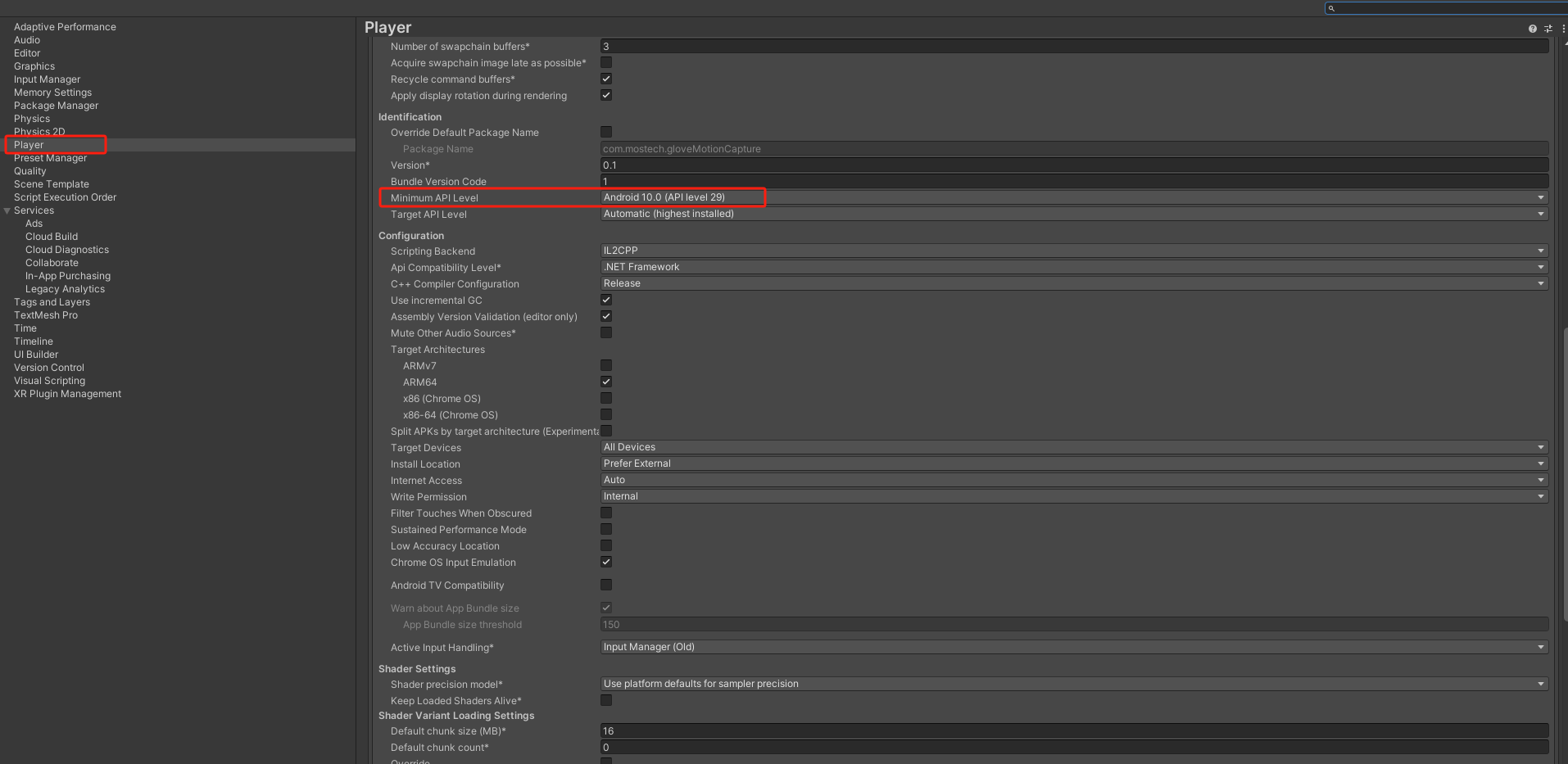
打包安卓时特殊配置
4.1设置minimun API Level
在Edit>Player>OtherSttings下minimun API Level设置为>=level 29的版本
4.2打包为ARM64
在Edit>Player>OtherSttings下先将Scripting Backend设置为IL2CPP,然后勾选ARM64