魔迅设备遥操宇树机器人&傲意灵巧手
网络连接
使用已将网段固定在192.168.123.xxx下的路由器,因为宇树机器人遥操作需要再此网段下才能驱动。
注意事项:
-
运行MS软件的电脑和路由器使用无线连接
-
宇树机器人和路由器使用有线连接
-
运行宇树机器人驱动脚本的笔记本(Linux)和路由器无线连接
笔记本(Linux)信息
查看电脑的ip
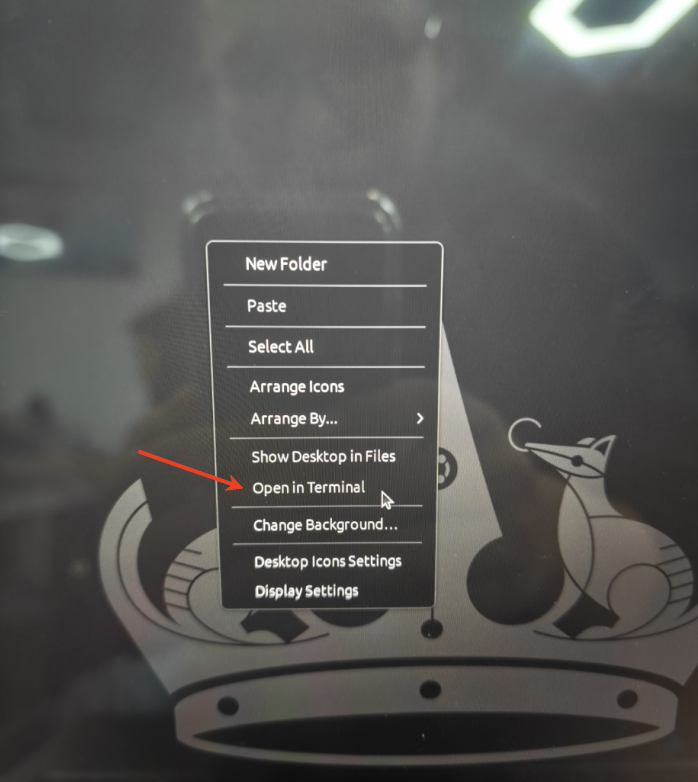
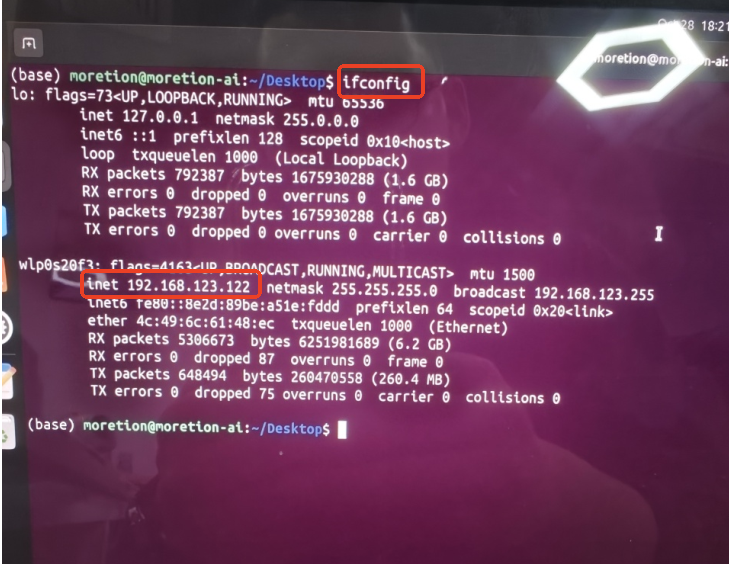
在电脑桌面右键Open in Terminal,输入指令ifconfig查看ip。可以看到此电脑的ip是192.168.123.122
设置机器人驱动脚本ip和port
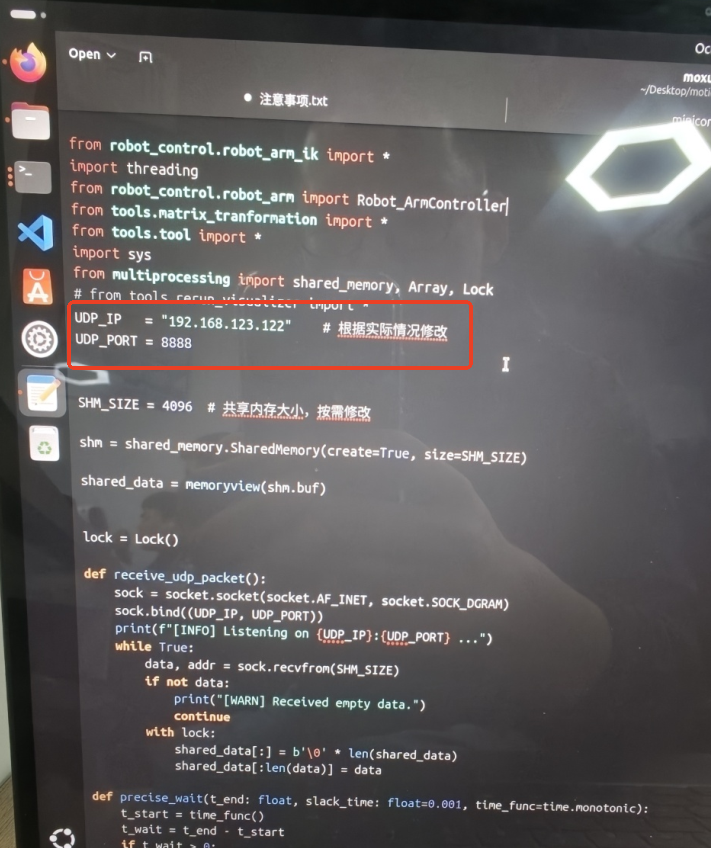
在/home/moretion/Desktop/motionCapture_teleoperte路径下双击打开moxun_robot.py脚本设置ip和port。ip为上方查看到的ip,port可以自定义例如:8888
MS软件设置
磁校准

连接设备

组合设备
全身+手套不组合使用可能会影响机器人的驱动


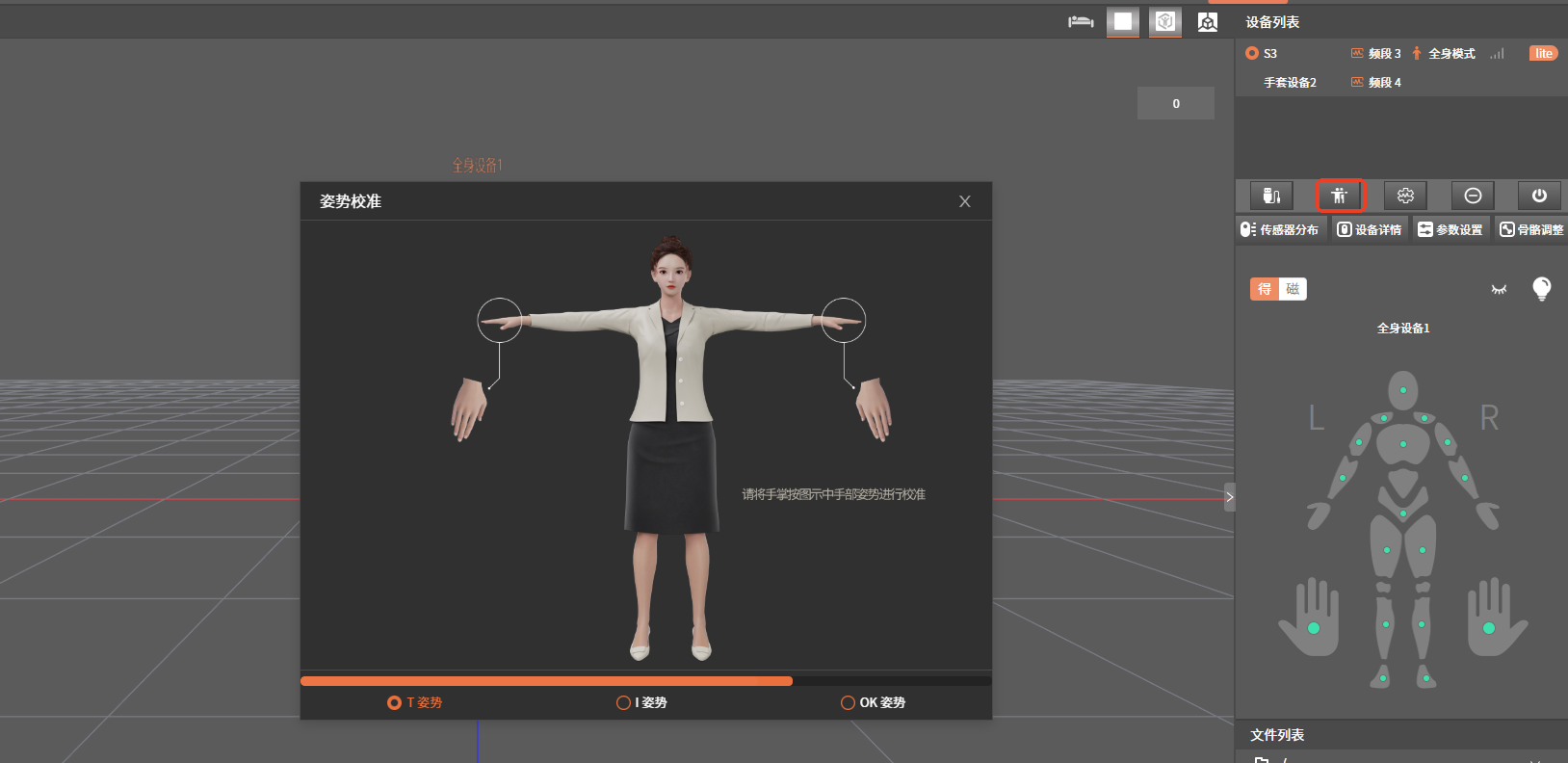
姿势校准
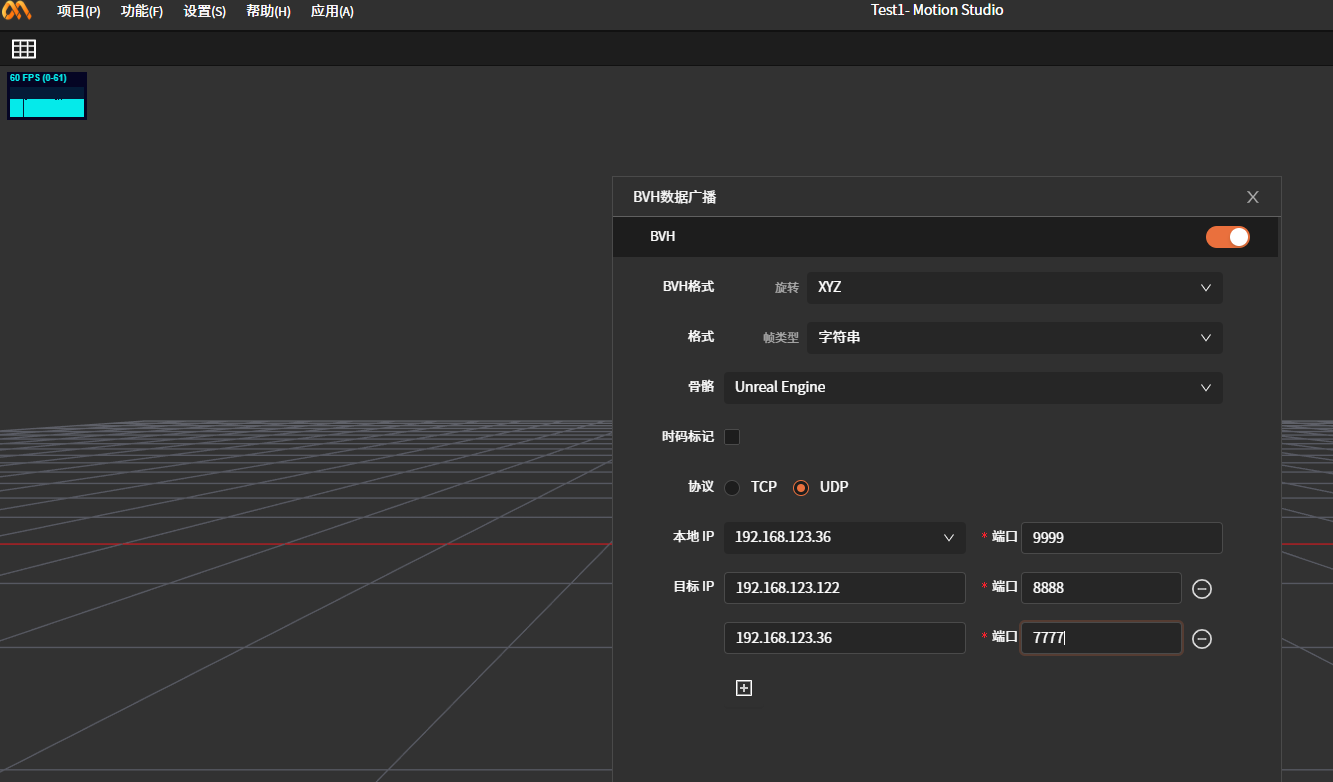
数据广播
协议类型选择UDP
ip port说明:
192.168.123.122:8888是华为笔记本(Linux)脚本moxun_robot.py中设置的ip和port
192.168.123.36:7777是跑傲意灵巧手软件中界面设置的ip和port

傲意灵巧手软件设置
要求魔迅手套能正常驱动傲意灵巧手,详细使用说明见《魔迅手套+傲意灵巧手使用文档》文档。
运行机器人驱动脚本
前提:上述流程已经走完,宇树机器人已调为测试模式
打开控制台
在华为笔记本(Linux)/home/moretion/Desktop/motionCapture_teleoperte文件夹下右键点击Open in Terminal(打开控制台)。
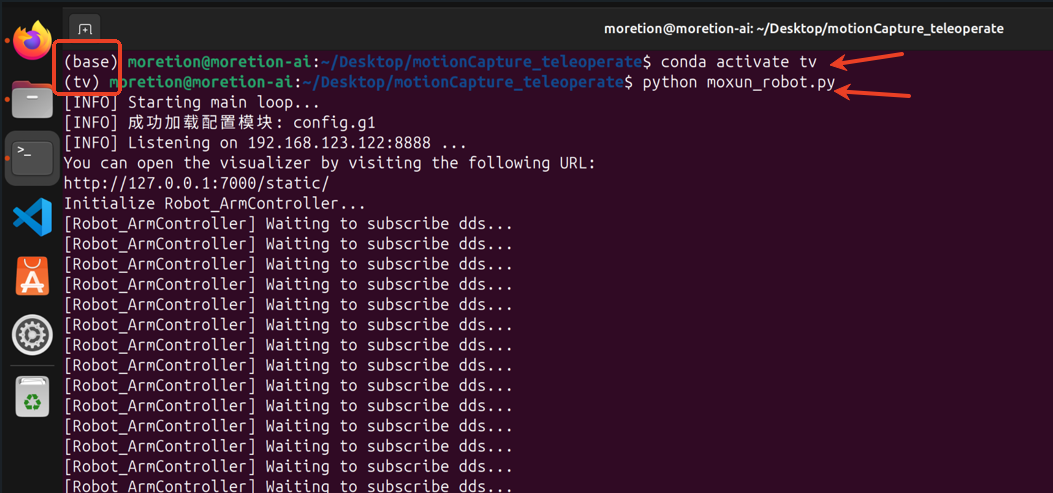
创建conda环境
输入指令conda activate tv按下"enter"键,切换环境
运行脚本
输入指令python moxun_robot.py按下"enter"键
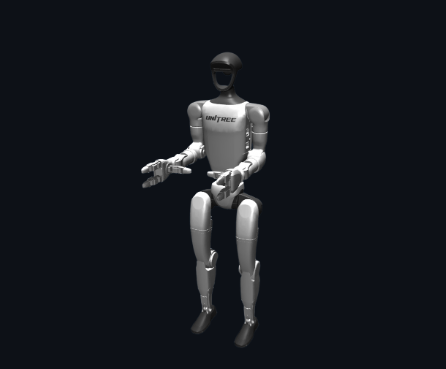
如果上述流程都正确操作的话机器人会切换到准备状态,此时穿戴动捕设备的真人做下图准备姿势
输入指令r按下"enter"键
正常情况真人就可以遥操作机器人了
退出程序
在控制台中按下ctrl+c键退出程序
在控制台不关闭的前提下,下次直接从\"#运行脚本\"那里往下走就可以了
注意事项
在遥操作机器人的过程中,魔迅软件不能做姿势校准
如果遥操宇树机器人&傲意灵巧手,魔迅全身+手套需要改为组合模式
设备清单:路由器、网线、运行ms软件的电脑(windows)、运行遥操作的电脑(Linux)、全身惯捕设备(1)、手套惯捕设备(1)